Supplement 2.18: De UV-IR-scanner
Werkingsprincipe
IR/UV-lijnscanners zijn al enige tijd in gebruik als standaardinstrument bij teledetectie van olievlekken vanuit de lucht. Ze zijn in staat om gelijktijdig de totale omvang van de olievlek in kaart te brengen, van dunne lagen (>0,01 µm dik) tot en met de dikke oppervlakteolie (> 100 μm dik). Het instrument maakt gebruik van twee verschillende sensoren:
- Een optische detector die gevoelig is voor licht in het nabij-ultraviolet (UV)-bereik, kenmerkend 320-380 nm, en
- een infrarood (IR) detector die gevoelig is voor straling in het thermische bereik, kenmerkend 8-12 μm.
Beide sensoren scannen dwars op de baan zoals te zien is rechts en vormen daarbij een rij pixels voor iedere scanlijn. De pixelgrootte dwars op de baan wordt bepaald door het "instantaneous field of view (IFOV)" (ogenblikkelijk gezichtsveld) en de vlieghoogte; de pixelgrootte parallel aan de baan wordt bepaald door de scansnelheid en vlucht van het vliegtuig. Omdat de scansnelheid en IFOV dezelfde zijn voor beide sensoren, produceren ze co-geregistreerde beelden van het wateroppervlak.
Oliedetectie door het olie-watercontrast te meten
De UV- en IR-sensoren werken in zeer verschillende delen van het elektromagnetisch spectrum, dus de fysische principes achter oliedetectie zijn zeer verschillend. De sensor meet verschillende eigenschappen van de olie en het omringende water, en het gamma natuurlijke verschijnselen dat aanleiding kan geven tot "valse positieven" is over het algemeen verschillend voor beide sensoren. Dit maakt hun combinatie een meer betrouwbaar instrument voor oliedetectie dan één van de sensoren op zichzelf.
Voor het monitoren van olievlekken is de belangrijke parameter olie-watercontrast. Deze wordt gewoonlijk gedefinieerd als het signaal van een olievlek min het signaal van het omringende water gedeeld door het signaal van het water. Wanneer het contrast 0 is, kan olie niet gedetecteerd worden; met negatieve of positieve contrast kan de olie gedetecteerd worden als het contrast groter is dan het ruisniveau van de instrumenten.
Olie-watercontrast op thermische IR-beelden
Detectie van oppervlakteolie in thermische gegevens is gebaseerd op heel andere fysische principes dan die welke verantwoordelijk zijn voor het olie-watercontrast in het UV-gedeelte van het spectrum. Olie wordt gedetecteerd op thermische beelden om twee redenen:
- Het thermisch emissievermogen van olie is lager dan dat van water.
- De temperatuur van oppervlakteolie verschilt vaak van de temperatuur van het omringende water.
 Zwart-lichaamstraling
Zwart-lichaamstraling
Alle oppervlakken geven elektromagnetische straling af in een breed spectraal bereik. Bij typische zeeoppervlaktetemperaturen is de emissiepiek 9-1 μ. Voor een ideaal lichaam (bekend als een zwart lichaam) wordt het thermische stralingsspectrum bepaald door de stralingswet van Planck (zie figuur) en de afgegeven straling staat bekend als zwart-lichaamstraling. De intensiteit van straling afgegeven door een reëel oppervlak is altijd lager dan de zwart-lichaamstraling en hangt af van het emissievermogen van het oppervlak. Het emissievermogen van zeewater is 98-99% in het thermische IR. Het emissievermogen van olie is kenmerkend 94-97% afhankelijk van olietype en graad van verwering. Dus olie zal koeler voorkomen dan water met dezelfde temperatuur. Dunnere oliefilms (‹ 50-1000 μm) zijn in essentie in thermisch evenwicht met het water en zullen daarom een negatief contrast geven. Echter, voor oliefilms dunner dan 1-2 maal de golflengte van de straling (10-20 μm) komt het grootste deel van het afgegeven signaal van het water onder de olie, dus is het contrast te laag om gedetecteerd te worden. De minimaal detecteerbare dikte ligt gewoonlijk tussen 20 en 70 μm.
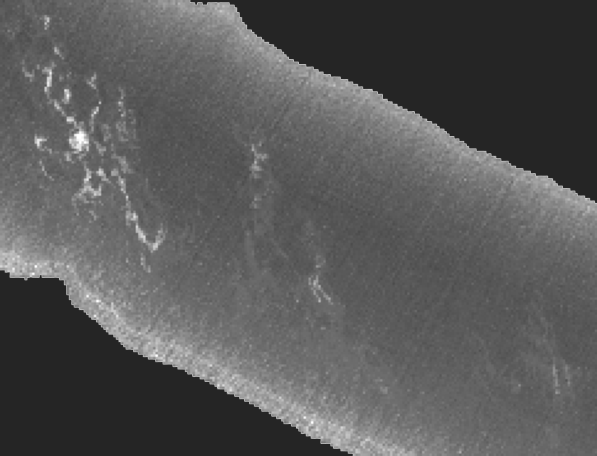
 IR-beeld van Forties crude
IR-beeld van Forties crude
Wanneer olie pas geloosd is, zal verdamping van vluchtige componenten het oppervlak afkoelen, dus de olie kan koeler zijn dan zijn omgeving. Eenmaal de verdamping gestopt is, zullen dunnere olielagen thermisch evenwicht met het water bereiken, maar dikkere olie zal beginnen op te warmen.
De absorptiecoëfficient van olie is kenmerkend vele duizenden keren hoger dan die van water bij zichtbare golflengtes (waar er pieken met zonnestraling zijn). Een laag ruwe olie van maar 200-500 μm dik (afhankelijk van type en verwering) absorbeert praktisch alle op het oppervlak invallende straling. De meeste stralingsenergie wordt in warmte omgezet. Een deel van de warmte wordt overgedragen op de lucht en het water, maar het thermische geleidingsvermogen van olie is laag. Dus dikke olie zal gewoonlijk warmer zijn dan het omringende water tijdens de uren overdag.
Bij een bepaalde dikte zal het effect van de hogere temperatuur het effect van het lagere emissievermogen van olie compenseren en de helderheidstemperatuur van de olie zal dezelfde zijn als de helderheidstemperatuur van het water. Boven deze drempeldikte zal de olie lichter lijken dan water op thermische beelden. De drempeldikte hangt af van de olie (absorptie-eigenschappen, verwering) en de omgeving ervan (invallend licht, water- en luchttemperaturen, toestand van de zee, enz.). Kenmerkend treedt de transitie op tussen 70 en 150 μm oliedikte.
Infraroodsensoren slagen er vaak niet in water-in-olie-emulsies te detecteren. Dit is waarschijnlijk omdat ze kenmerkend 70% water bevatten, dus het verschil in emissievermogen is klein. Het water in de emulsie verhoogt ook de thermische geleidbaarheid van de olie, dus de olie is waarschijnlijk in evenwicht met zijn omgeving.
Een aantal "evenbeelden" van olie kunnen aanleiding geven tot het foutief identificeren van olie op thermische beelden. Dit zijn onder andere onkruid, kusten en oceaanranden.
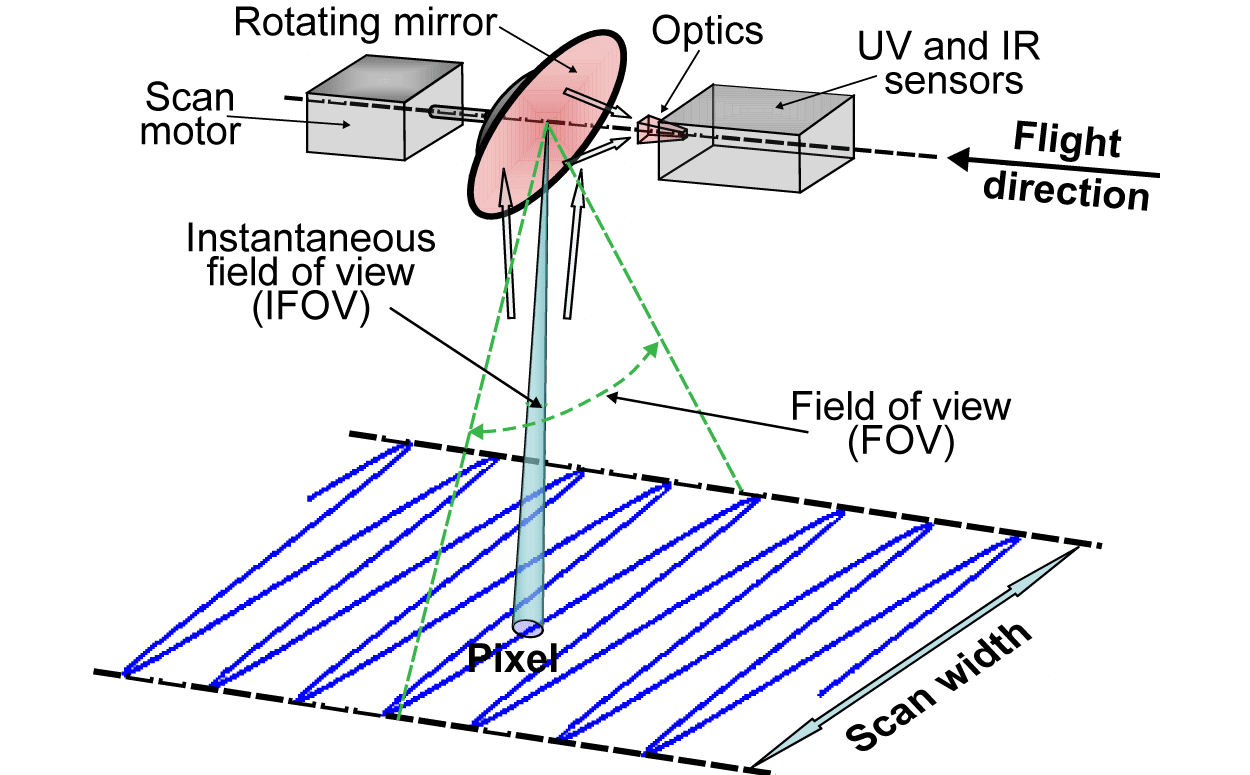 Geometrie van de werking van de UV / IR-lijnscanner
Geometrie van de werking van de UV / IR-lijnscanner
Typische sensorspecificaties:
- UV-golfband: λ = 320 - 380 nm
- IR-golfband: λ = 8 - 12 μ,m
- Scanningmethode: dwars op de baan
- Scanningsnelheid: 20 Hz (20 lijnen per seconde)
- Ogenblikkelijk gezichtsveld (IFOV): 2.5 mrad (= 0.014°)
- Gezichtsveld (FOV): 90°
- Vlieghoogte: ideaal 1000 ft
Olie-watercontrast op UV-beelden
UV-sensoren detecteren oppervlakteolie omdat de optische eigenschappen van de olie erg verschillen van die van het omringende water.
- Olie heeft een hogere brekingsindex dan water, vooral in het UV; dus oppervlakteolie weerkaatst meer van het invallend licht van de zon en lucht en lijkt lichter dan het omringende water.
- • In fel zonlicht kunnen UVA- en UVB-straling oliefluorescentie opwekken bij golflengtes van ongeveer 360 nm en langer; deze door de zon geïnduceerde fluorescentie neemt toe naarmate de dikte van de olie toeneemt.
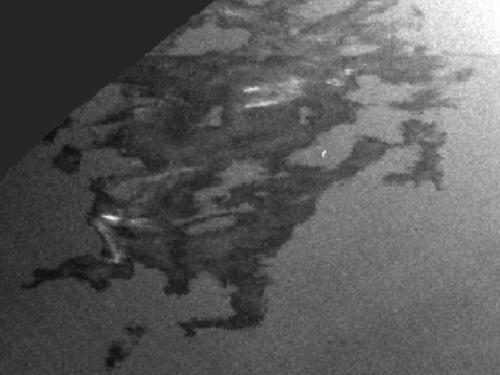
 UVbeeld van ruwe olie
UVbeeld van ruwe olie
Olie-watercontrast in het UV is gewoonlijk positief. Een zwak positief contrast kan gedetecteerd worden bij diktes zo klein als 0,01 μm bij rustige omstandigheden. Het contrast neemt toe naarmate de oliedikte toeneemt. Bij een olielaag van een paar micron dik kan door de zon geïnduceerde fluorescentie bijdragen tot de helderheid van de olie. Geëmulgeerde olie kan er bijzonder helder uitzien (sterk positief contrast). Sommige UV-sensoren gebruiken een bandbreedte die violet (390-450 nm) en blauw (450-480 nm) kan bevatten. Dit verhoogt hun gevoeligheid voor door de zon geïnduceerde fluorescentie van ruwe oliën, maar vermindert het vermogen van de sensor om zeer dunne olie te detecteren.
De interpretatie van UV-gegevens is niet altijd rechtlijning. Een aantal verschijnselen kan foutief voor olie aanzien worden: o.a. windslikken (windstille plekken), schuim of "sunglint" (zonneschittering), weerkaatsing van wolken en biogenisch materiaal. Detectie is betrouwbaarder wanneer hij gestaafd worden door gegevens van andere sensortypes.
Fusie van UV/IR-gegevens
Gegevensfusie is de combinatie van gegevens van verschillende sensoren om informatie te krijgen die misschien niet betrouwbaar verkregen is door alleenstaande sensoren alleen. De techniek om UV- en IR-beelden te combineren bij detectie van olievlekken is gebaseerd succesvolle oliedetectie gedurende meerdere decennia met UV- en IR-camera's en videocamera's en later met lijnscanners die in staat zijn om gegeoreferentiëerde digitale beelden te produceren. Ultraviolet (UV)- en thermische infrarood (IR)-sensoren zijn gevoelig voor zeer uiteenlopende oliediktebereiken, dus door overlappende beelden van de twee sensoren kunnen betrouwbare kaarten van relatieve oliedikte worden geproduceerd.
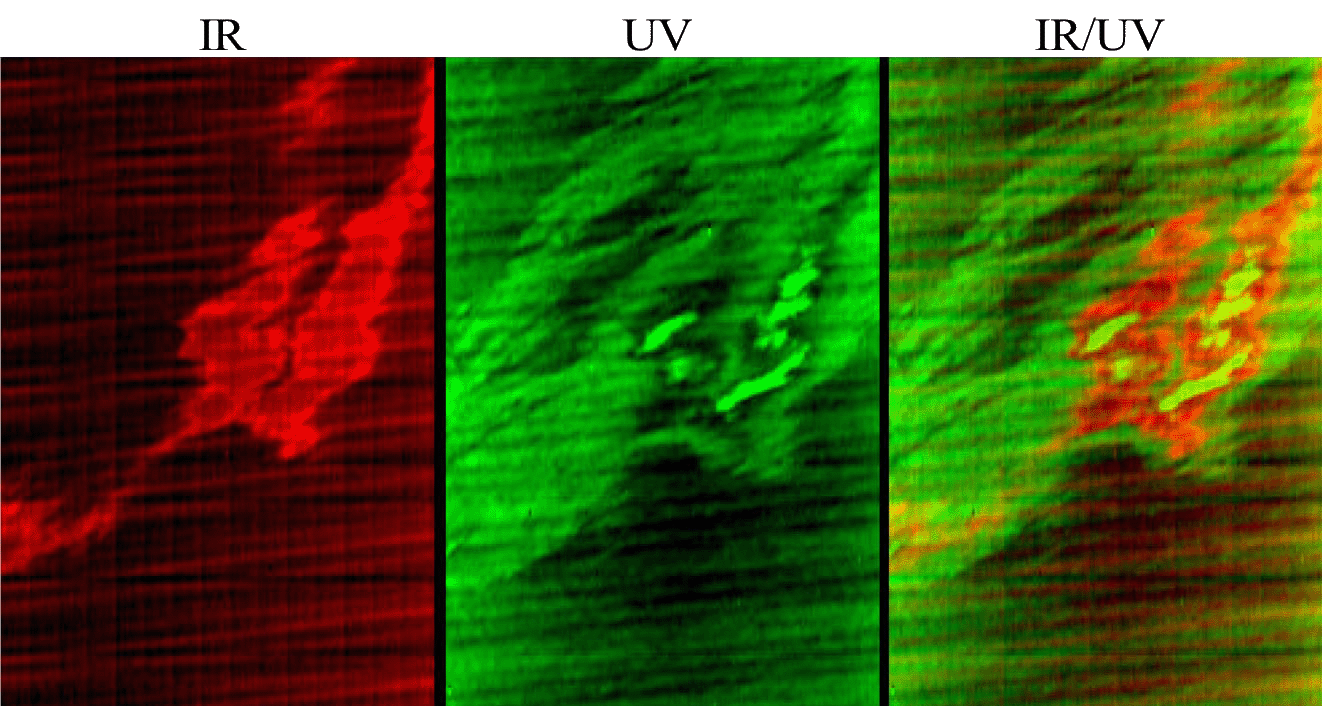 IR-, UV- en gecombineerd kunstmatig beeld van een olieslik, gedetecteerd in de lente van 2000.
IR-, UV- en gecombineerd kunstmatig beeld van een olieslik, gedetecteerd in de lente van 2000.
Voor gegevensfusie is vereist dat de beelden die gecombineerd worden hetzelfde gebied bestrijken en praktisch identiek zijn qua ruimtelijke resolutie. Bij sensoren die onafhankelijk gebruikt worden bij variërende aftastsnelheden, verschillende sensorgeometrie, strookbreedte, verschillende gegevensformaten, enz. is gegevensfusie tijdverslindend en moeilijk uit te voeren. Als echter twee sensoren worden gecombineerd, om een gemeenschappelijke geometrie en scanningsnelheid te hebben, wordt fusie veel eenvoudiger, met rechtstreekse een-op-een mapping tussen twee of meer beelden.
